近日,第18届计算机图形学与互动技术大会(SIGGRAPH Asia 2025)在香港举办。软件学院师生参加会议,汇报了学院在计算机图形学、智能交互与机器人领域的最新研究成果。
1.论文题目:Diffusion-Guided Relighting for Single-Image SVBRDF Estimation(SIGGRAPH Asia 2025)。山东大学为论文第一完成单位,软件学院博士研究生邢佑鑫为该篇文章的第一作者,软件学院王璐教授为通讯作者。
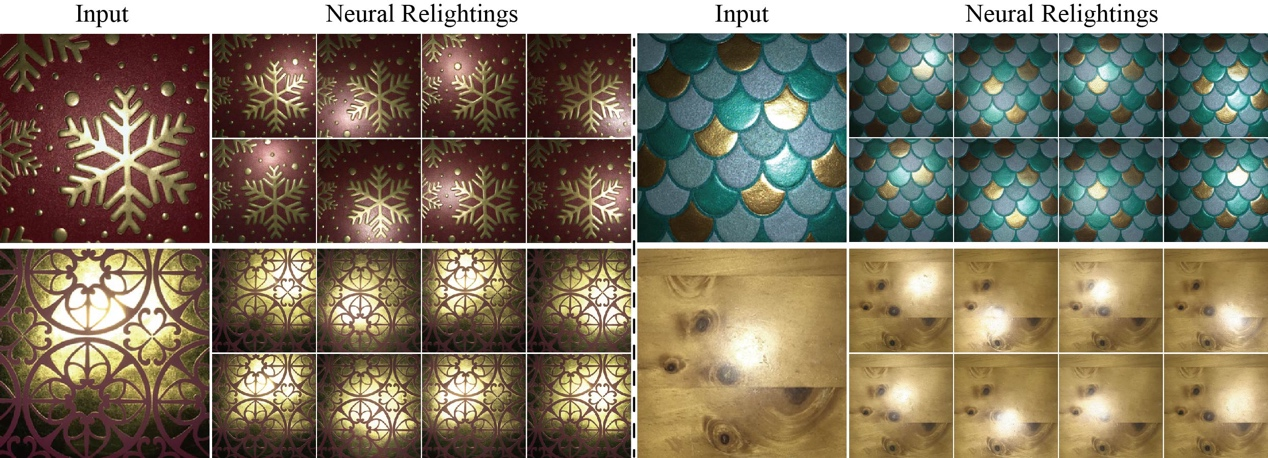
论文简介:针对输入图像中强镜面高光对材质特征提取和重光照质量造成的严重干扰,论文提出了一种由扩散模型引导的重光照框架,实现对背景信息与高光信息的有效解耦。该方法通过背景一致性建模与镜面高光先验重用,显著降低了重光照阶段的高光 burn-in 伪影;同时将相机参数与光照位置作为条件嵌入扩散模型,在保持背景稳定的同时生成视觉真实的重光照结果。此外,该方法可与支持多图输入的材质 SVBRDF 估计器协同工作,生成高质量、高分辨率的 SVBRDF maps。实验结果表明,该方法在真实数据与合成数据集上均取得了优越性能,为单张图像条件下的高质量材质重建提供了新的解决思路。
2.论文题目:SymBridge: A Human-in-the-Loop Cyber-Physical Interactive System for Adaptive Human-Robot Symbiosis(SIGGRAPH Asia 2025 Conference Track)。山东大学为论文第一完成单位,山东大学博士研究生陈浩然为该篇文章的第一作者,软件学院李曼祎副研究员、上海科技大学马月昕助理教授为通讯作者。
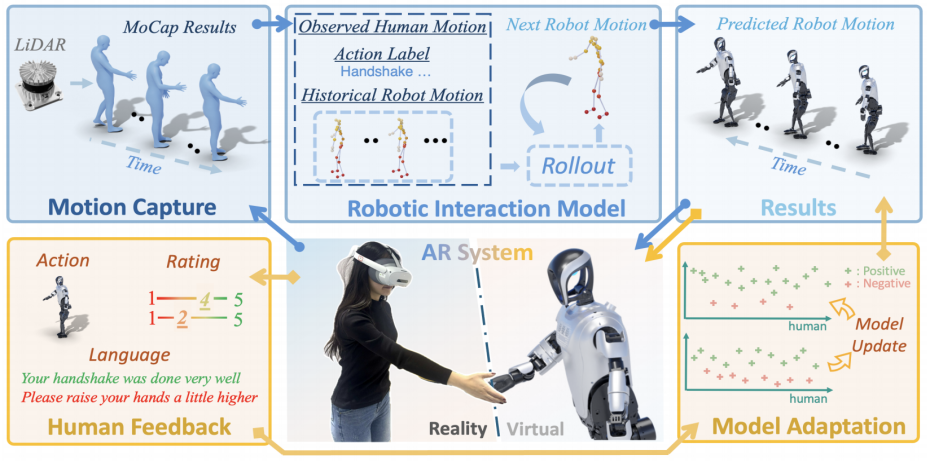
论文简介:该研究面向人机共生这一智能机器人领域的重要目标,提出了一个支持“人在回路”的信息物理交互系统 SymBridge。针对现有机器人模拟器难以引入真实人类参与、交互体验不真实的问题,SymBridge 通过增强现实技术,将真人与虚拟机器人实时连接,实现自然、高效且安全的人机交互。系统利用雷达与动作捕捉设备实时获取人体动作信息,并结合交互模型预测机器人未来动作,通过动作重定向实现对机器人关节的精确控制。大量实验、用户研究及机器人真机测试表明,该系统在实时性、真实性和易用性方面均表现优异,为人机协同与人机共生研究提供了重要支撑平台。
3.论文题目:NeuVAS: Neural Implicit Surfaces for Variational Shape Modeling(SIGGRAPH Asia 2025 Journal Track,Journal Accept)。山东大学为论文第一完成单位,软件学院王鹏飞副研究员为该篇文章的第一作者,德州农工大学王文平教授为通讯作者,合作导师包括山东大学张彩明教授、屠长河教授、周元峰教授以及辛士庆教授等。
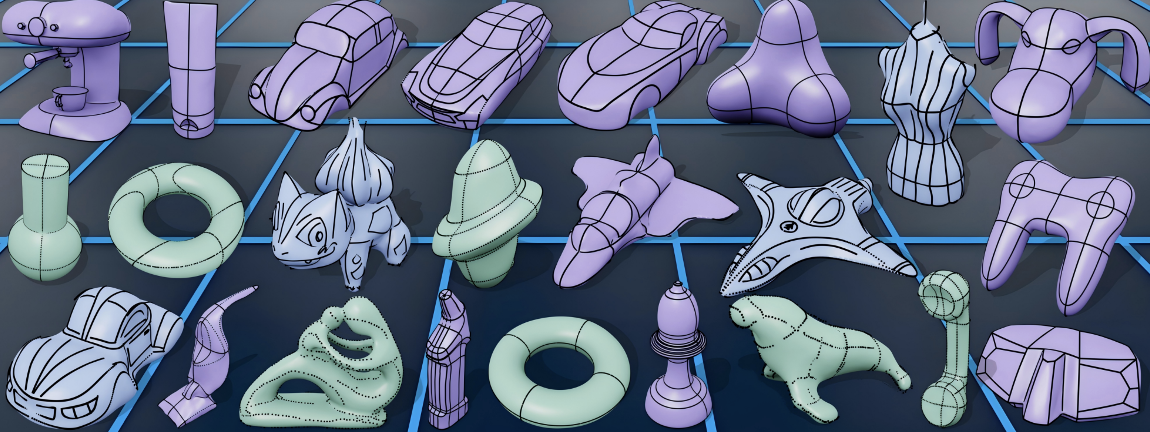
论文简介:该研究聚焦几何建模领域中“由稀疏曲线重建高质量曲面”这一基础而富有挑战性的核心问题。针对曲面精确逼近输入曲线、曲线之外形状自然控制以及尖锐特征的分段光滑表达等关键难题,论文提出了一种基于神经隐式曲面的变分建模方法。该方法利用多层感知机(MLP)编码的神经符号距离函数(SDF)对曲面进行建模,并通过狄利克雷条件和 Eikonal 条件确保曲线插值精度,同时引入基于薄板能量的光滑正则项,实现曲线外围区域的形态规整。该工作突破了传统方法仅支持三维连接曲线网络作为输入的限制,可处理不连续草图、曲线网络及稀疏点云等多种输入形式。论文将同期发表在国际顶级期刊 ACM Transactions on Graphics 上。
SIGGRAPH Asia 作为中国计算机学会(CCF)推荐的 A 类国际会议,论文评审流程严格、学术水准高。学院多项成果入选 SIGGRAPH Asia 2025,不仅展示了学院在计算机图形学与智能交互领域的前沿研究实力,也进一步提升了学院在国际学术舞台上的影响力。学院朱君秋研究员受邀担任 SIGGRAPH Asia 2025 论文技术委员会委员及分会场主席,李曼祎副研究员担任分会场主席,体现了学院教师在国际学术共同体中的专业认可与学术影响力。
(文/图:朱君秋 李曼祎 王鹏飞 责任编辑:刘士军)
